


का कार्य सिद्धांतग्रहीय रोलर पेंचयह है: मिलान मोटर पेंच को घुमाने के लिए प्रेरित करती है, और मेशिंग रोलर्स के माध्यम से, मोटर की घूर्णी गति को नट की रैखिक घूमने वाली गति में परिवर्तित किया जाता है। ग्रहीय रोलर पेंच सर्पिल गति और ग्रहीय गति को जोड़ती है, जो उच्च प्रदर्शन आवश्यकताओं वाली व्यापक स्थितियों के लिए बहुत उपयुक्त है।
चित्र में ग्रहीय रोलर स्क्रू दिखाया गया है। इसके मुख्य घटक हैं:
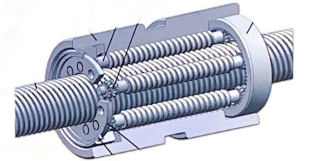
पेंच, इसका धागा प्रोफ़ाइल एक समकोण त्रिभुज है (3 सिर और अधिक के साथ धागे)
कड़े छिलके वाला फल, इसका आंतरिक धागा प्रोफ़ाइल स्क्रू के समान ही है।
रोलरसिंगल-स्टार्ट थ्रेड में, प्रत्येक रोलर के सिरे पर एक बेलनाकार पिवट और एक गियर पिवट होता है जो बैफल के गोल छेद में लगा होता है ताकि रोलर्स रेडियल दिशा में समान रूप से वितरित हों। गियर के दांत आंतरिक रिंग गियर के साथ जुड़े होते हैं, जिससे रोलर आसानी से आगे की ओर चल सकता है।
Rधारण वलय,बाधक को लॉक करना।
फ्लैट कुंजीइसका उपयोग संचालित वस्तुओं को जोड़ने के लिए किया जाता है। इसकी संरचना सरल है, इसे अलग करना और जोड़ना आसान है, और इसमें अच्छे हेजिंग गुण हैं। यह उच्च गति, परिवर्तनशील भार और प्रभाव स्थितियों के लिए उपयुक्त है।
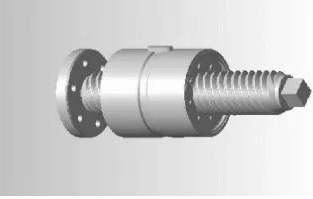
रिवर्स प्लैनेटरी रोलर स्क्रू, जिसे रिवर्स रोलर स्क्रू और रिवर्स प्लैनेटरी रोलर स्क्रू के रूप में भी जाना जाता है, एक रैखिक ट्रांसमिशन डिवाइस को संदर्भित करता है जिसमें रोलर व्यवस्था या आंदोलन की दिशा पारंपरिक प्लैनेटरी रोलर स्क्रू के विपरीत होती है।
रिवर्स प्लैनेटरी रोलर स्क्रू का आकार छोटा और भार ज़्यादा होता है। फ्रेमलेस मोटर के साथ, इसका उपयोग मानव-सदृश रोबोट के हाथ, पैर, कूल्हे के जोड़ आदि के लिए किया जा सकता है।
मानक ग्रहीय रोलर स्क्रू में उच्च गति, मज़बूत भार वहन क्षमता और उच्च परिशुद्धता के लाभ होते हैं। इनका प्रभावी स्ट्रोक एक मीटर से भी अधिक तक पहुँच सकता है, जिससे ये अत्यधिक भारी भार वाले वातावरण के लिए बहुत उपयुक्त होते हैं।
स्क्रू के नए रिलीज़ पॉइंट के लिए मानव सदृश रोबोट। समलम्बाकार स्क्रू औरगेंद पेंचयांत्रिक मशीन टूल्स के क्षेत्र में, ग्रहीय रोलर स्क्रू का अनुप्रयोग परिपक्व हो चुका है, और वर्तमान में इसका उपयोग केवल विमानन और अन्य उच्च-स्तरीय अनुप्रयोगों में ही किया जाता है। टेस्ला ह्यूमनॉइड मशीन 14 रैखिक कुंजी 8-10 रोलर स्क्रू का उपयोग करेगी।
पोस्ट करने का समय: 06-दिसंबर-2024




